
RC-Rasenmäher
<-Technik->
| Baujahr: | 2003 | |
| Leistung: | 3,5 PS | |
| Vmax: | Schrittgeschwindigkeit | |
| Status: | demontiert | |


Schon lange habe ich darüber nachgedacht wie man
sich das Rasenmähen etwas vereinfachen könnte. Die perfekte Lösung ist
sicherlich ein Automat oder Roboter der eine vorher festgelegte Bahn
abfährt. Man kann ja schon Robbies kaufen aber fast alle fahren ziellos
über den Rasen bis zu einem Hindernis oder die abgesteckte Begrenzung,
stoßen an und drehen dann um. Außerdem sind die sehr klein,
Batteriemodell (kein Sound), Mulcher ohne Korb und teuerer als selber
bauen.
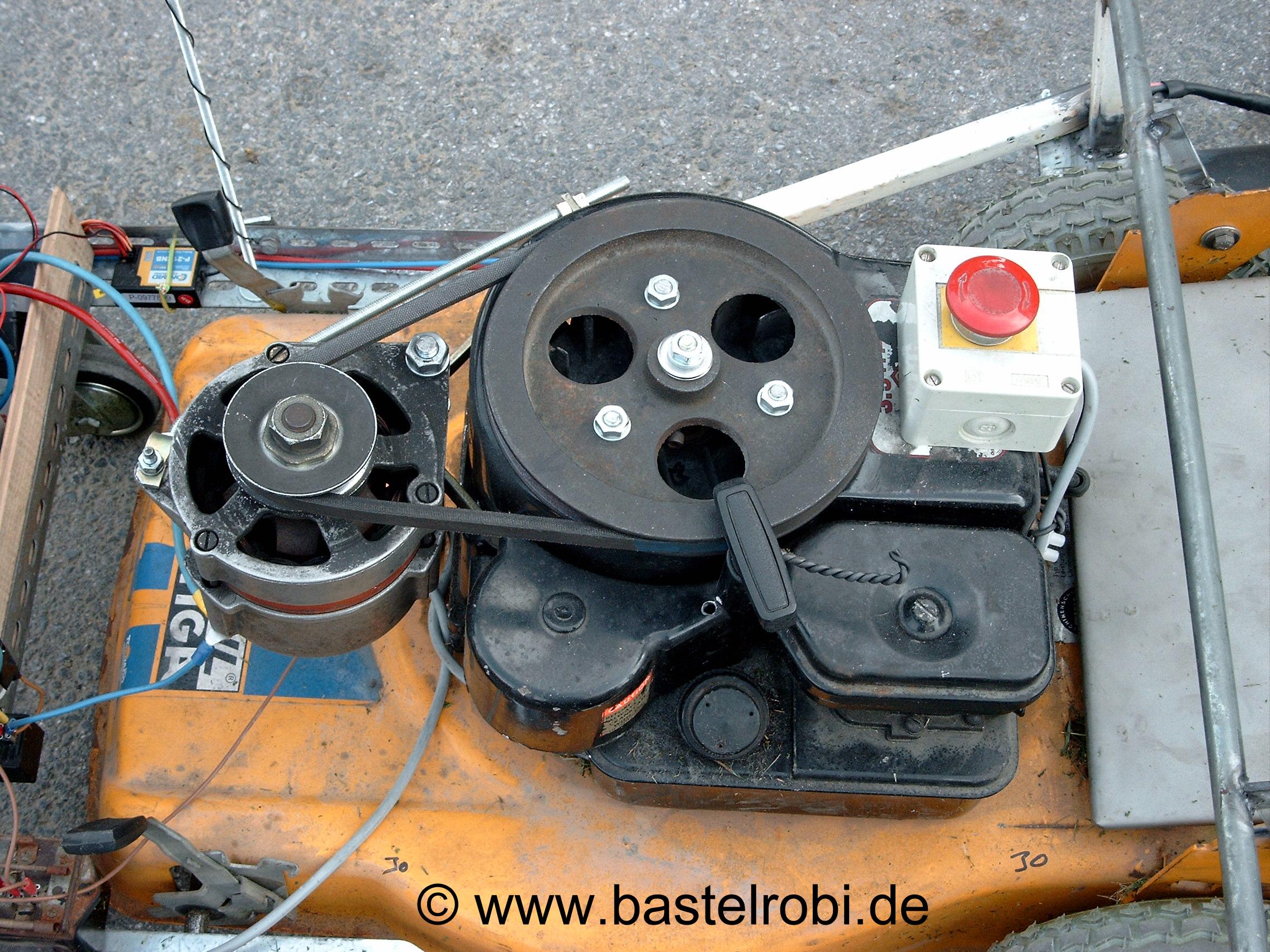
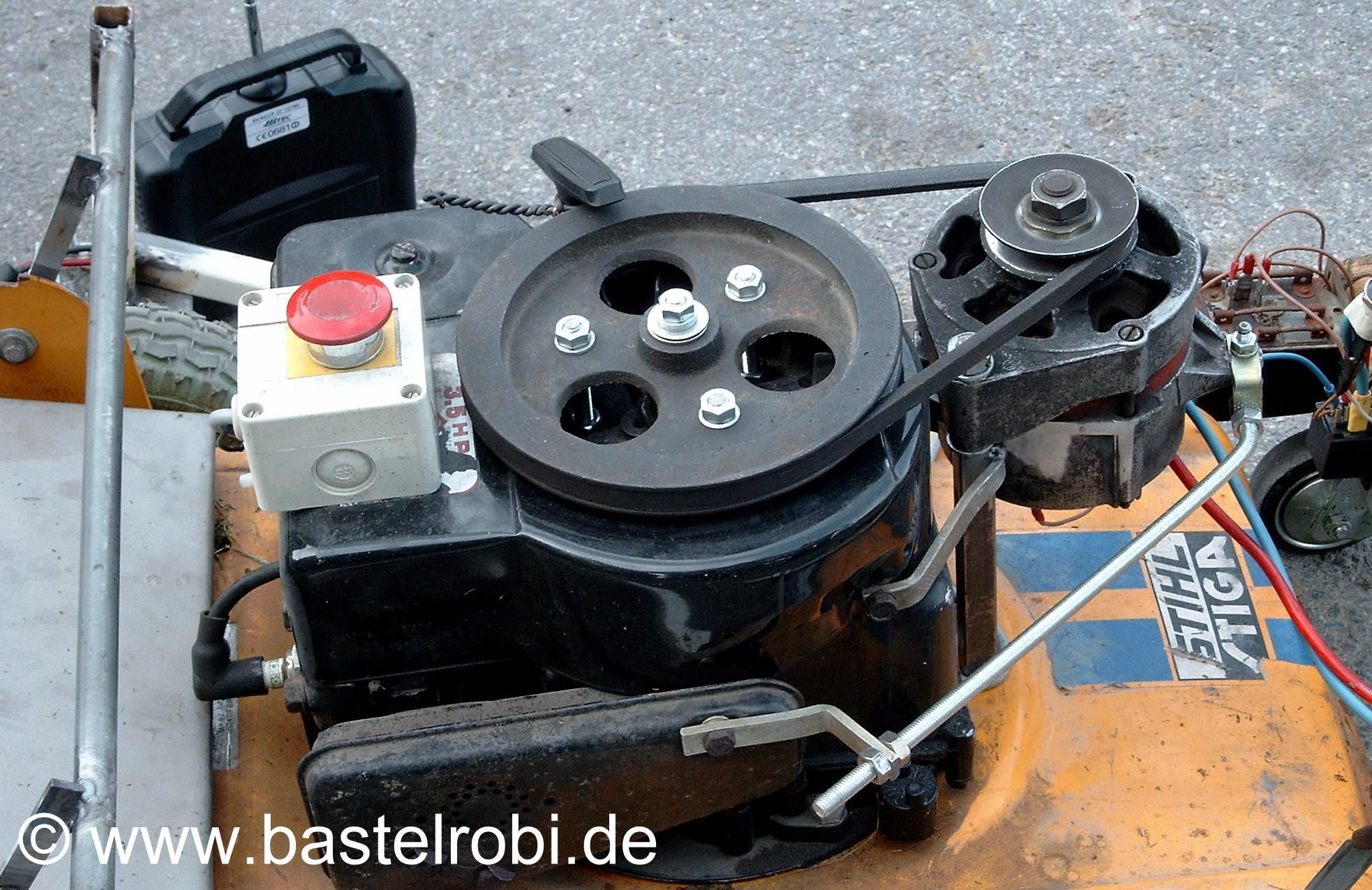
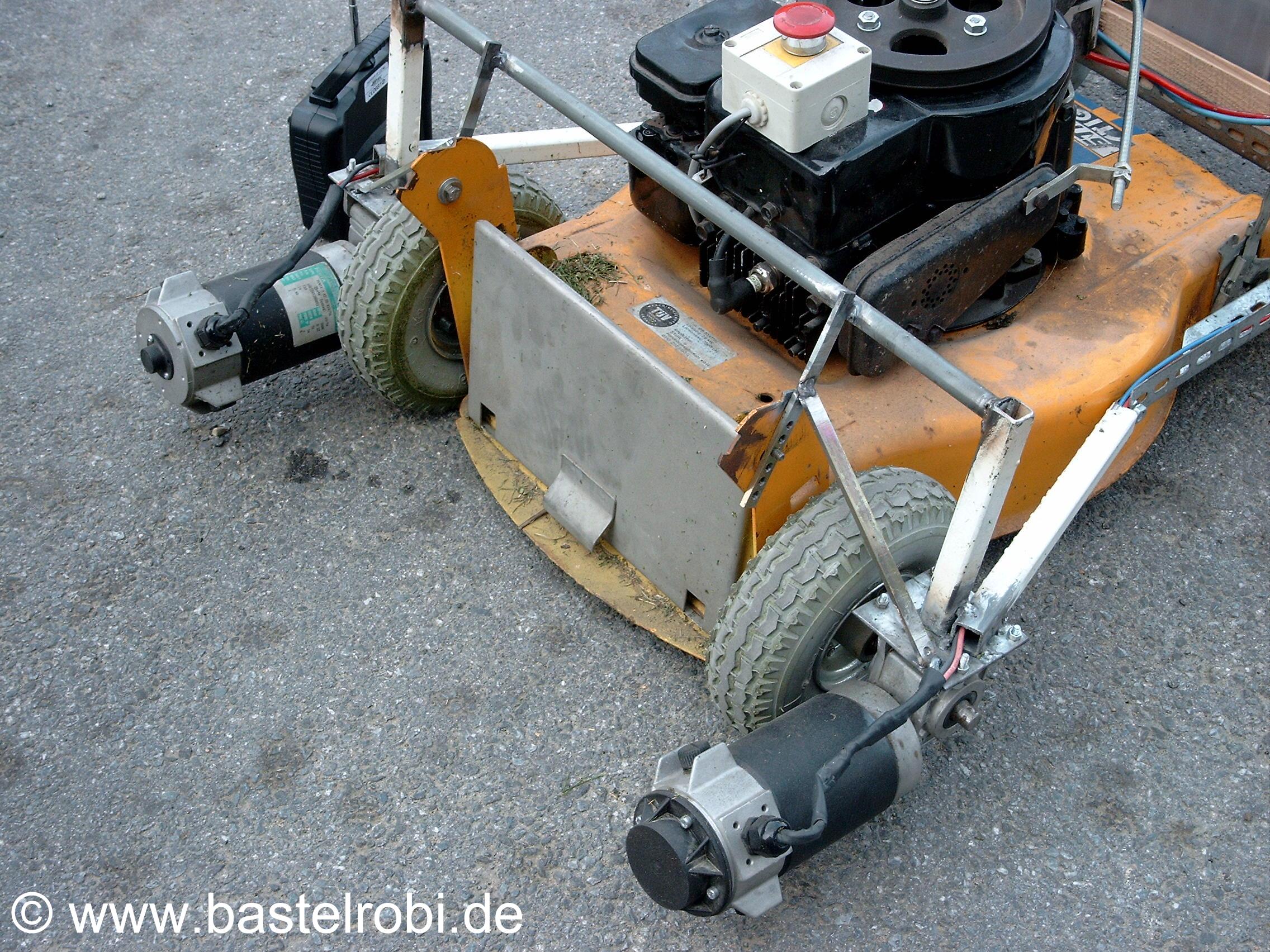
Ich habe mir dann gedacht dass bei einem ferngesteuerten Mäher doch sicherlich jeden Nachbar vor Neid Erblassen würde. Die originalen Räder würden demontiert, am Motor auf dem Schwungrad eine Riemenscheibe angebracht, die einen KFZ-Drehstromgenerator („Lichtmaschine“) antreibt. Dieser lädt dann die vorne angebrachte Motorradbatterie und stellt die Versorgungsspannung für beide elektrischen Antriebe zur Verfügung. Luftbereifte Räder 210 x 50mm auf je einem 24V/150W Getriebemotor (Alte Rollstuhlantriebe). Die werden in diesem Fall nur mit 12Volt gespeist so dass die Drehzahl und die Leistung etwas kleiner ausfalllen. Dann noch eine 49 Euro 2-Kanal Fernbedienung dran geschmiedet und "Nr.5 lebt". Ein 2-Kanal Kreuzmischer hinter dem Empfänger geschaltet koordiniert hier über 2 elektronische Fahrtenregler die beiden Antriebe: Wenn ich nach vorne oder hinten fahre werden beide Motoren gleich angesteuert, wenn ich dann eine Kurve fahre wird der kurveninnere Motor weniger stark angesteuert. Beim Lenken im Stillstand wird ein Motor rechts und der andere links angesteuert so dass auf der Stelle gedreht werden kann („Panzerlenkung“). Eigentlich sollte oben drauf noch eine Kamera mit Funkübertragung ins Wohnzimmer, dann könnte sogar auf eine Sicherverbindung zum Mäher verzichtet werden. Der Anbaurahmen kann vorne und hinten höhenverstellt werden, nur für die selbstständige Entleerung des Fangkorbes hab ich auf die Schnelle keine Lösung gefunden.





Download:
Abschließend kommt die Erkenntnis:
- Die Vorderräder der Lenkrollen waren viel zu klein
- Diese „Panzerlenkung“ ist zwar schnell und einfach gebaut aber im Fahrverhalten auch sehr hakelig.
- Damit eine schön gerade Bahn zu mähen ist nicht ganz einfach.
Bei einem Nachbau würde ich:
- auf eine höherwertigere Fernbedienung setzten (z.B. 40Mhz statt 27Mhz)
- die Störaussendung der Zündungsanlage des Mähermotors nicht unterschätzen…
- 3 statt 4 Räder anbauen wobei hinten nur 2 lose Räder mitlaufen würden und dafür vorne ein gelenkes Antriebsrad verbauen.
- Evt. eine große Lärmschutzhaube über den Benziner bauen – leise sind die, insbesondere die Abgasanlagen, definitiv nicht!
Über eine Roboter bzw. Automat muss ich mir noch etwas den Kopf zerbrechen, aber die Zeit wird kommen...;-))